Prototyptillverkning med snabb styrning
Rapid Control Prototyping (RCP) är en metod för att validera styralgoritmer genom att använda mjukvarumodeller för att styra prototyper. De flesta styralgoritmer utvecklas initialt i en modelleringsmiljö som t.ex. Simulink.

Styrsystemet för slutprodukten kommer så småningom att implementeras i ett programmeringsspråk som är optimerat för inbäddad programmering. Övergången från en renodlad modell till faktisk inbyggd programvara i en komplett produkt är aldrig sömlös, men den blir ännu svårare om styralgoritmerna inte är noggrant validerade.
RCP innebär att ett mät- och styrsystem som både kan exekvera en matematisk modell och skicka och ta emot alla fysiska signaler som styrenheten senare ska göra, används under den inledande prototypframtagningen, tills det är validerat att modellerna faktiskt motsvarar en önskvärd slutprodukt. Detta möjliggör snabb iteration och validering av styralgoritmerna, vilket ökar produktkvaliteten och förkortar utvecklingstiden.
RCP: Ett virtuellt styrsystem
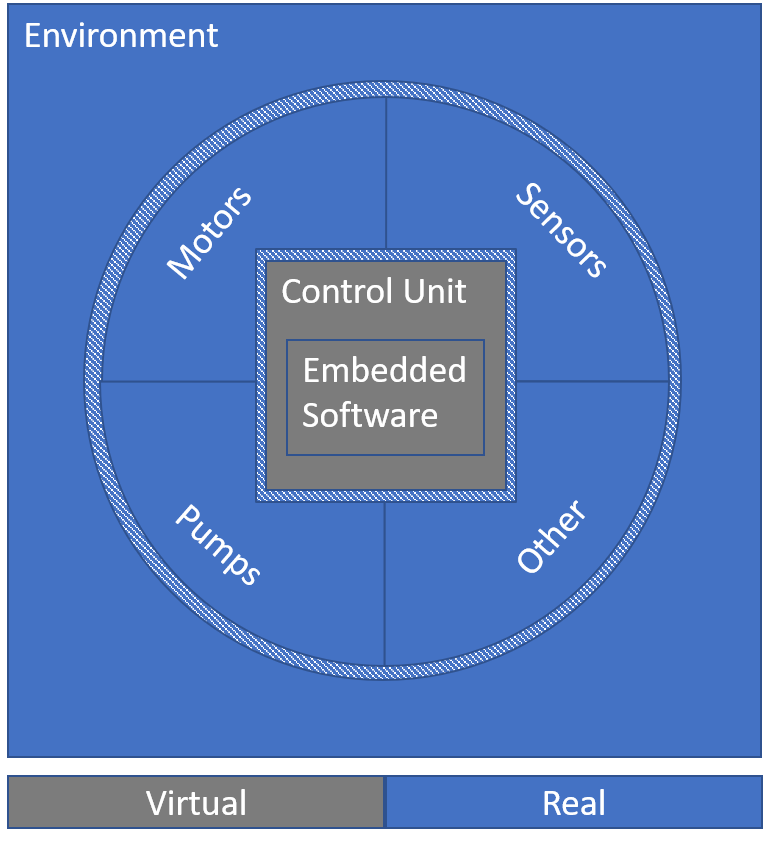
RCP innebär att ett virtuellt styrsystem används för att styra den fysiska produkten i dess verkliga miljö, eller åtminstone i ett labb. När kontrollalgoritmerna är fullständigt validerade påbörjas implementeringen av algoritmen i den inbyggda programvaran. För att verifiera funktionaliteten hos den inbäddade programvaran på den inbäddade styrenheten kan ett HIL-system (Hardware-in-the-Loop) användas. HIL är motsatsen till RCP: Det faktiska styrsystemet appliceras på en virtuell miljö.
LabVIEW och National Instruments hårdvaruplattformar
LabVIEW och NI:s hårdvaruplattformar är utmärkta verktyg för att implementera både RCP och HIL. Den modulära CompactRIO-plattformen kan läsa och skriva nästan alla fysiska signaler och protokoll i en liten formfaktor (i ett prototpysammanhang). LabVIEW Model Interface Toolkit kan i sin tur exekvera modeller från följande modelleringsspråk:
- MathWorks, Inc. Simulink® programvara
- SimuleringX från ITI
- Dymola från Dynasim
- Esterel SCADE Suite Programvara
- C/C++
- GT-POWER från Gamma Technologies
- AMESim från LMS
- AVL BOOST
- AVL KRYSSNING
- Rational Rhapsody från IBM
- MapleSim från MapleSoft
- Dynacar från Tecnalia
- CarSim från Mekanisk simulering
- VI-CarRealTime från VI-Grade
- JMAG RT FEA-modeller från JMAG
- TESIS DYNAprogramvara
- Fortran
- MATRIXx Systemuppbyggnad
- Carmaker från IPG
- EcoSimPro från EA Internacional
- WAVE-RT från Ricardo